On combining machine learning-based and theoretical ecosystem models
In this post, I explore the benefits and drawbacks of using empirical (ML)-based models versus mechanistic models for predicting ecosystem responses to perturbations. To evaluate these different modelling approaches, I use a mechanistic ecosystem model to generate a synthetic time series dataset.
By applying both modelling approaches to this dataset, I can evaluate their performance. While the ML-based approach yields accurate forecasts under unperturbed dynamics, it inevitably fails when it comes to predicting ecosystem response to perturbations. On the other hand, the mechanistic model, which is simplified version of the ground truth model to reflect a realistic scenario, is inaccurate and cannot forecast, but provides a more adequate approach to predict ecosystem response to unobserved scenarios.
To improve the accuracy of mechanistic models, I introduce inverse modelling, and in particular an approach that I have developed called piecewise inference. This approach allows to accurately calibrate complex mechanistic models, and doing so open doors to improve our understanding ecosystems by performing model selection.
Finally, I discuss how hybrid models, which incorporate both ML-based and mechanistic components, offer the potential to benefit from the strengths of both modelling approaches. By examining the strengths and limitations of these different modelling approaches, I hope to provide insights into how best to use them to advance our knowledge of ecological and evolutionary dynamics.
Notes
- This post is under construction, and contain typos! If you find some, please contact me so that I can correct
- For the sake of clarity, some pieces of code have voluntarily been hidden in external Julia files, which are loaded throughout the post. If you want to inspect them, check out those files in the corresponding GitHub repository
Generating a synthetic dataset
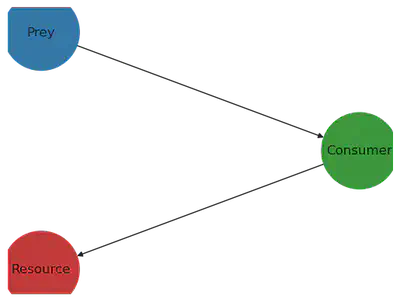
To generate the synthetic dataset, I consider a 3 species ecosystem model, composed of a resource, consumer and prey species. The resource growth rate depends on water availability. Here is a simplified version of the dynamics
$$\begin{aligned} \text{basal growth of } \text{🌱} &= f(\text{💧})\\ \text{per capita growth rate }\text{🌱} &= \text{basal growth} - \text{competition} - \text{grazing} - \text{death}\\ \text{per capita growth rate }\text{🦓} &= \text{grazing} - \text{predation} - \text{death}\\ \text{per capita growth rate }\text{🦁} &= \text{predation} - \text{death} \end{aligned}$$
Let’s implement that in Julia!
cd(@__DIR__)
import Pkg; Pkg.activate(".")
using PythonCall
nx = pyimport("networkx")
np = pyimport("numpy")
include("model.jl")
include("utils.jl");
To implement the model, I use the library EcoEvoModelZoo, which provides to the user ready-to-use mechanistic eco-evolutionary models. I use the model type SimpleEcosystemModel, cf. documentation of EcoEvoModelZoo. Let’s first construct the trophic network, and plot it
using EcoEvoModelZoo
N = 3 # number of species
pos = Dict(1 => [0, 0], 2 => [0.2, 1], 3 => [0, 2])
labs = Dict(1 => "Resource", 2 => "Consumer", 3 => "Prey")
foodweb = DiGraph(N)
add_edge!(foodweb, 2 => 1) # Consumer (node 2) feeds on Resource (node 1)
add_edge!(foodweb, 3 => 2) # Predator (node 3) fonds on consumer (node 2)
println(foodweb)
Graphs.SimpleGraphs.SimpleDiGraph{Int64}(2, [Int64[], [1], [2]], [[2], [3],
Int64[]])
plot_foodweb(foodweb, pos, labs)
(<py Figure size 640x480 with 1 Axes>, <py Axes: >)
Then, I implement the processes that drive the dynamics of the ecoystem. Those include resource limitation for the resource species (e.g. limitation in nutrients), intraspecific competition for the resource species, reproduction, and feeding interactions (grazing and predation). To better understand this piece of code, you may want to refer to one of my previous blog post, “Inverse ecosystem modelling made easy with PiecewiseInference.jl”.
function carrying_capacity(p, t)
@unpack K₁₁ = p
K = vcat(K₁₁, ones(Float32, N - 1))
return K
end
carrying_capacity (generic function with 1 method)
function competition(u, p, t)
@unpack A₁₁ = p
A = spdiagm(vcat(A₁₁, zeros(Float32, 2)))
return A * u
end
competition (generic function with 1 method)
resource_conversion_efficiency(p, t) = ones(Float32, N)
resource_conversion_efficiency (generic function with 1 method)
Functional responses
The feeding processes implemented are based on a functional response of type II. The attack rates q define the slope of the functional response, while the handling times H define the saturation of this response.

W = adjacency_matrix(foodweb)
I, J, _ = findnz(W)
function feeding(u, p, t)
@unpack H₂₁, H₃₂, q₂₁, q₃₂ = p
# handling time
H = sparse(I, J, vcat(H₂₁, H₃₂), N, N)
# attack rates
q = sparse(I, J, vcat(q₂₁, q₃₂), N, N)
return q .* W ./ (one(eltype(u)) .+ q .* H .* (W * u))
end
feeding (generic function with 1 method)
Dependence of resource growth rate on water availability
We model a time-varying water availability, and a growth rate of the resource which depends on the water availability.
water_availability(t) = sin.(2 * pi / 600 * 5 * t)
growth_rate_resource(r, water) = r * exp(-0.5*(water)^2)
intinsic_growth_rate(p, t) = [growth_rate_resource(p.r[1], water_availability(t)); p.r[2:end]]
intinsic_growth_rate (generic function with 1 method)
Let’s plot what does the water availability looks like through time
ts = tspan[1]:1:tspan[end]
fig = figure()
plot(ts, water_availability.(ts))
xlabel("Time (days)")
ylabel("Water availability (normalized)")
fig.set_facecolor("None")
Python None
Now we define the numerical values for the parameter of the ecosystem model.
p_true = ComponentArray(H₂₁=Float32[1.24], # handling times
H₃₂=Float32[2.5],
q₂₁=Float32[4.98], # attack rates
q₃₂=Float32[0.8],
r=Float32[1.0, -0.4, -0.08], # growth rates
K₁₁=Float32[1.0], # carrying capacity for the resource
A₁₁=Float32[1.0]) # competition for the resource
ComponentVector{Float32}(H₂₁ = Float32[1.24], H₃₂ = Float32[2.5], q₂₁ = Flo
at32[4.98], q₃₂ = Float32[0.8], r = Float32[1.0, -0.4, -0.08], K₁₁ = Float3
2[1.0], A₁₁ = Float32[1.0])
And with that, we can plot how we implemented the dependence between the resource growth rate and the water availability. It is a gaussian dependence, where the resource growth rate is maximum at a certain value of water availability. The intuition is that too much or too little water is detrimental to the resource.
water_avail_range = reshape(sort!(water_availability.(tsteps)),length(tsteps))
fig = figure()
plot(water_avail_range, growth_rate_resource.(p_true.r[1], water_avail_range))
xlabel("Water availability (normalized)")
ylabel("Resource basal growth rate")
fig.set_facecolor("none")
Python None
Now let’s simulate the dynamics
u0_true = Float32[0.77, 0.060, 0.945]
mp = ModelParams(;p=p_true,
tspan,
u0=u0_true,
solve_params...)
model = SimpleEcosystemModel(;
mp,
intinsic_growth_rate,
carrying_capacity,
competition,
resource_conversion_efficiency,
feeding)
`Model` SimpleEcosystemModel
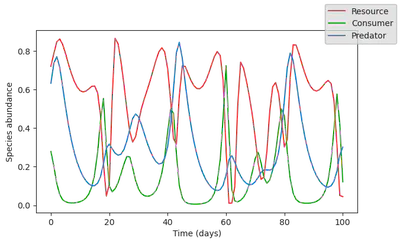
fig, ax = plot_time_series(simulate(model));
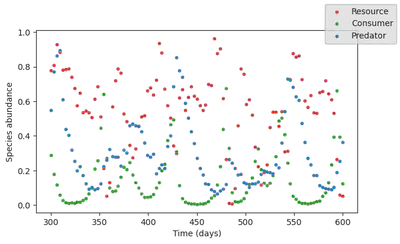
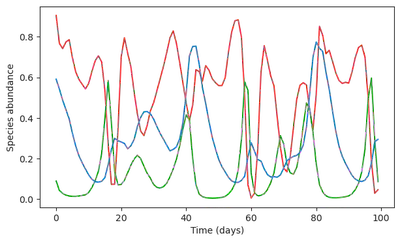
And let’s generate a dataset by contaminating the model output with lognormally distributed noise.
data = simulate(model) |> Array
# contaminating raw data with noise
data = data .* exp.(1f-1*randn(Float32, size(data)))
# plotting
fig, ax = subplots(figsize=(7,4))
for i in 1:size(data,1)
ax.scatter(tsteps, data[i, :], label=labels_sp[i], color = species_colors[i], s=10.)
end
# ax.set_yscale("log")
ax.set_ylabel("Species abundance")
ax.set_xlabel("Time (days)")
fig.set_facecolor("None")
ax.set_facecolor("None")
fig.legend()
display(fig)
Empirical modelling
Let’s build a ML-model, and train the model on the time series.
We’ll use a recurrent neural network model

More specifically, we use a Long Short Term Memory cell, connected to two dense layers with relu and a radial basis (rbf) activation functions.
using Flux # Julia deep learning library
include("rnn.jl") # Load some utility functions
args = ArgsEco() # Set up hyperparameters
rbf(x) = exp.(-(x.^2)) # custom activation function
hls = 64 # hidden layer size
# Definition of the RNN
# our model takes in the ecosystem state variables, together with current water availability
rnn_model = Flux.Chain(LSTM(N + 1, hls),
Flux.Dense(hls, hls, relu),
Flux.Dense(hls, N, rbf))
@time train_model!(rnn_model, data, args) # Train and output model
75.555727 seconds (137.67 M allocations: 50.030 GiB, 6.62% gc time, 37.42%
compilation time)
We can now simulate our trained model in an autoregressive manner, which allows us to forecast over time steps beyond the training dataset.
tsteps_forecast = tspan[end]+dt:dt:tspan[end]+100*dt
water_availability_range = water_availability.(vcat(tsteps, tsteps_forecast))
init_states = data[:,1:2]
pred_rnn = simulate(rnn_model, init_states, water_availability_range)
3×200 Matrix{Float32}:
0.762119 0.808972 0.814921 0.789933 … 0.871319 0.816685 0.742632
0.118674 0.0965346 0.0672258 0.0434324 0.119743 0.14609 0.185878
0.530488 0.531594 0.518911 0.476789 0.301607 0.29676 0.31418
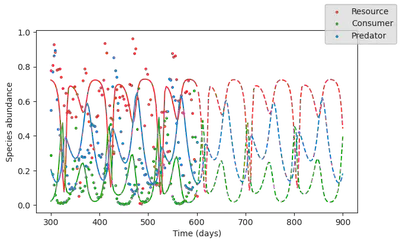
And let’s plot it. Plain lines are the model output for the training time span, and dashed lines are the model forecast.
fig, ax = subplots(1, figsize=(7,4))
for i in 1:N
ax.scatter(tsteps[3:end],
data[i, 3:end],
label = labels_sp[i],
color = species_colors[i],
s = 6.)
ax.plot(tsteps[2:end],
pred_rnn[i,1:length(tsteps)-1],
c = species_colors[i])
ax.plot(tsteps_forecast .+ dt,
pred_rnn[i,length(tsteps):end],
linestyle="--",
c = species_colors[i])
end
ax.set_ylabel("Species abundance")
ax.set_xlabel("Time (days)")
fig.set_facecolor("None")
ax.set_facecolor("None")
fig.legend()
display(fig)
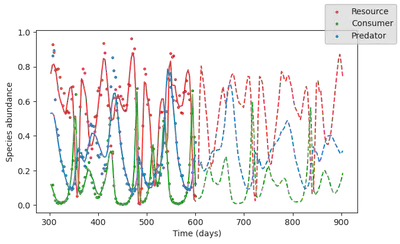
Looks pretty good!
Now let’s see what happens if the resource species go extinct. Because this species is at the bottom of the trophic chain, we expect a collapse of the ecosystem.
water_availability_range = water_availability.(tsteps)
init_states = data[:,1:2]
init_states[1,:] .= 0.
pred_rnn = simulate(rnn_model, init_states, water_availability_range)
3×100 Matrix{Float32}:
0.904891 0.767216 0.741785 0.774109 … 0.183886 0.0288432 0.04645
4
0.0890969 0.0426226 0.0287545 0.019797 0.596416 0.293802 0.08636
74
0.59085 0.542144 0.487364 0.441334 0.178284 0.282761 0.29444
7
fig, ax = subplots(1, figsize=(7,4))
for i in 1:N
ax.plot(
pred_rnn[i,:],
c = species_colors[i])
end
ax.set_ylabel("Species abundance")
ax.set_xlabel("Time (days)")
fig.set_facecolor("None")
ax.set_facecolor("None")
display(fig)
There is clearly a problem! The RNN model outputs almost unchanged dynamics, predicting that magically, the resource would revive. This were to be expected: the ML model did not see this type of collapse dynamics, so it cannot invent it.
In summary, ML-based model
- 👍 Very good for interpolation
- 👍 Does not require any knowledge from the system, only data!
- 👎 Cannot extrapolate to unobserved scenarios
Mechanistic modelling
We now define a new mechanistic model, deliberatively falsifying the numerical value of the parameters compared to the baseline ecosystem model, and simplifying the resource dependence on water availbility by assuming that its growth rate is constant. The resulting model_mechanistic is as such an inaccurate representation of the baseline ecosystem model.
p_mech = ComponentArray(H₂₁=Float32[1.1],
H₃₂=Float32[2.3],
q₂₁=Float32[4.98],
q₃₂=Float32[0.8],
r = Float32[1.0, -0.4, -0.08],
K₁₁=Float32[0.8],
A₁₁=Float32[1.2])
u0_mech = Float32[0.77, 0.060, 0.945]
mp = ModelParams(; p=p_mech,
u0=u0_mech,
solve_params...)
growth_rate_mech(p, t) = p.r
model_mechanistic = SimpleEcosystemModel(; mp, intinsic_growth_rate = growth_rate_mech ,
carrying_capacity,
competition,
resource_conversion_efficiency,
feeding)
simul_data = simulate(model_mechanistic)
Let’s now plot its dynamics
plot_time_series(simul_data);
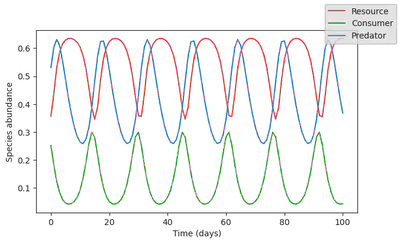
The dynamics looks quite different from the time series, and cannot provide any realistic forecast of the ecosystem state in the future. Yet, it does capture some of the dynamics, since it reproduces an oscillatory behavior. As such, we can assume that this ecosystem model captures some of the processes driving the baseline ecosystem dynamics.
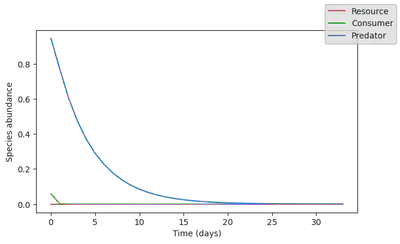
We can now use this mechanistic model to again try to understand what happens if the resource species go extinct.
simul_data = simulate(model_mechanistic,
u0 = Float32[0., 0.060, 0.945],
saveat=0:dt:100.)
plot_time_series(simul_data);
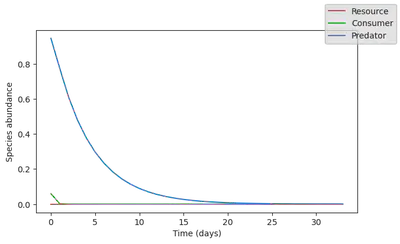
That makes much more sense!!! The model does predict a collapse, and we can even estimate how long it will take for the system to fully collapse.
In summary, mechanistic models
- 👍 Very good for extrapolating to novel scenarios
- 👎 Hard to parametrise
- 👎 Inacurate
Now let’s see how we can improve this ecosystem model, by making better use of the dataset that we have at hand.
Inverse modelling
Use the observed data to infer the parameters of a model
There are two broad classes of methods to perform inverse modelling:
-
Bayesian inference
- provide uncertainties estimations
- does not scale well with the number of parameters to explore
-
Variational optimization
- Does not suffer from the curse of dimensionality
- Convergence to local minima
- Need for parameter sensitivity
To better understand the caveats of the variational optimization approach, let’s further explain it. This method consists in defining a certain loss function, which allows to measure a distance between the model output and the observations:
$$ \text{L} = \sum_i [\text{observations} - \text{simulations}]^2 $$
Variational optimization methods seek to minimize $L$ by using its gradient (sensitivity) with respect to the model parameters. This gradient indicates how to update the parameters to reduce the distance between the observations and the simulation outputs.
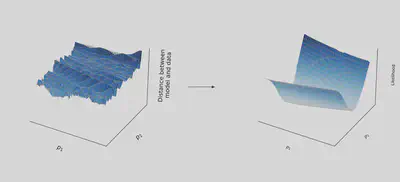
This can be done iteratively until finding the parameters that minimize the loss, as illustrated below.

This works very well! In theory.
In practice, the landscape is rugged, as in the picture below
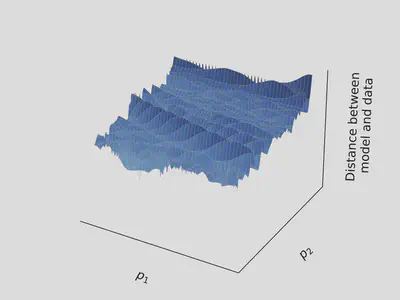
By following the gradient in such a landscape, variational optimization methods tend to get stuck in wrong regions of the parameter space, and provide false estimate.
PiecewiseInference.jl
PiecewiseInference.jl is a julia package that I have authored, which implements a method to smoothen the loss landscape, and that permits to automatically obtain the model parameter sensitivity. It is detailed in the following preprint
Boussange, V., Vilimelis-Aceituno, P., Pellissier, L., Mini-batching ecological data to improve ecosystem models with machine learning. bioRxiv (2022), 46 pages.
⚠️ We will shortly rename this preprint in a revised version, as the term “mini batching” is confusing. We now prefer the term “partitioning”
The method works by training the model on small chunks of data
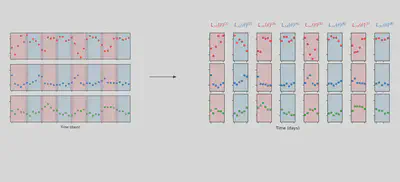
Let’s use it to tune the paramters of our mechanitic model. We’ll group data points in groups of 11, indicated by the argument group_size = 11
using PiecewiseInference
include("utils.jl"); # some utility functions defining `inference_problem_args` and `piecewise_MLE_args`
loss_likelihood(data, pred, rg) = sum((log.(data) .- log.(pred)).^2)
infprob = InferenceProblem(model_mechanistic,
p_mech;
loss_likelihood,
inference_problem_args...);
@time res_mech = piecewise_MLE(infprob;
group_size = 11,
data = data,
tsteps = tsteps,
optimizers = [Adam(1e-2)],
epochs = [500],
piecewise_MLE_args...)
piecewise_MLE with 101 points and 10 groups.
Current loss after 50 iterations: 14.972400665283203
Current loss after 100 iterations: 12.230918884277344
Current loss after 150 iterations: 11.497014045715332
Current loss after 200 iterations: 11.264657020568848
Current loss after 250 iterations: 11.19422721862793
Current loss after 300 iterations: 11.16870403289795
Current loss after 350 iterations: 11.156006813049316
Current loss after 400 iterations: 11.14731216430664
Current loss after 450 iterations: 11.141851425170898
Current loss after 500 iterations: 11.138410568237305
166.285066 seconds (1.17 G allocations: 177.010 GiB, 10.44% gc time, 27.02%
compilation time: 0% of which was recompilation)
`InferenceResult` with model SimpleEcosystemModel
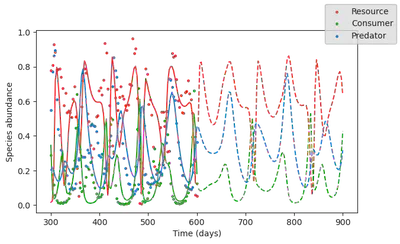
Now let’s plot what does this trained model predicts
simul_mech_forecast = simulate(model_mechanistic,
p = res_mech.p_trained,
u0 = data[:,1],
saveat = vcat(tsteps, tsteps_forecast),
tspan = (0, tsteps_forecast[end]));
fig, ax = subplots(1, figsize=(7,4))
for i in 1:N
ax.scatter(tsteps,
data[i,:],
label = labels_sp[i],
color = species_colors[i],
s = 6.)
ax.plot(tsteps[1:end],
simul_mech_forecast[i,1:length(tsteps)],
c = species_colors[i])
ax.plot(tsteps_forecast,
simul_mech_forecast[i,length(tsteps)+1:end],
linestyle="--",
c = species_colors[i])
end
ax.set_ylabel("Species abundance")
ax.set_xlabel("Time (days)")
fig.set_facecolor("None")
ax.set_facecolor("None")
fig.legend()
display(fig)
Looks much better! The model now captures doubling period oscillations.
In summary, mechanistic models
- 👍 Very good for extrapolating to novel scenarios
- 👎
Hard to parametrise - 👎 Inacurate
Model selection
To improve the accuracy, one can try to formulate different models corresponding to alternative hypotheses about the processes driving the ecosystem dynamics. For instance, we could compare the performance of this model to an alternative model, which would capture some sort of dependence between the water availability and the resource growth rate.
If we find that the refined model performs better than the model with constant growth rate, we have learnt that water availability is an important driver that affects the ecosystem dynamics.
Hybrid models
Assume that we have no idea on what the dependence of the resource growth rate on water availability may look like.
To proceed, we can define a very generic parametric function that can capture any sort of dependence, and then try to learn the parameters of this function from the data.
Neural networks are parametric functions that are highly suited for this sort of task. So we’ll build a hyrbid model, which contains the mechanistic components of the previous model, but where the resource growth rate is parametrized by a neural network.
🤖 + 🔬= 🤯
Below, we define the neural network, and the resource growth rate based on this neural net.
using Lux
rng = Random.default_rng()
# Multilayer FeedForward
hlsize = 5
neural_net = Lux.Chain(Lux.Dense(1,hlsize,rbf),
Lux.Dense(hlsize,hlsize, rbf),
Lux.Dense(hlsize,hlsize, rbf),
Lux.Dense(hlsize, 1))
# Get the initial parameters and state variables of the model
p_nn, st = Lux.setup(rng, neural_net)
p_nn = p_nn |> ComponentArray
growth_rate_resource_nn(p_nn, water) = neural_net([water], p_nn, st)[1]
function hybrid_growth_rate(p, t)
return [growth_rate_resource_nn(p.p_nn, water_availability(t)); p.r]
end
hybrid_growth_rate (generic function with 1 method)
Now we define our new hybrid model that implements this hybrid_growth_rate function
p_hybr = ComponentArray(H₂₁=p_mech.H₂₁,
H₃₂=p_mech.H₃₂,
q₂₁=p_mech.q₂₁,
q₃₂=p_mech.q₃₂,
r = p_mech.r[2:3],
K₁₁=p_mech.K₁₁,
A₁₁=p_mech.A₁₁,
p_nn = p_nn)
mp = ModelParams(;p=p_hybr,
u0=u0_mech,
solve_params...)
model_hybrid = SimpleEcosystemModel(; mp,
intinsic_growth_rate = hybrid_growth_rate,
carrying_capacity,
competition,
resource_conversion_efficiency,
feeding)
`Model` SimpleEcosystemModel
And we train it
infprob = InferenceProblem(model_hybrid,
p_hybr;
loss_likelihood,
inference_problem_args...);
res_hybr = piecewise_MLE(infprob;
group_size = 11,
data = data,
tsteps = tsteps,
optimizers = [Adam(2e-2)],
epochs = [500],
piecewise_MLE_args...)
piecewise_MLE with 101 points and 10 groups.
Current loss after 50 iterations: 5.201906204223633
Current loss after 100 iterations: 3.6290767192840576
Current loss after 150 iterations: 3.519521713256836
Current loss after 200 iterations: 3.4955437183380127
Current loss after 250 iterations: 3.4787349700927734
Current loss after 300 iterations: 3.5343759059906006
Current loss after 350 iterations: 3.4698166847229004
Current loss after 400 iterations: 3.4563584327697754
Current loss after 450 iterations: 3.5980613231658936
Current loss after 500 iterations: 3.4506189823150635
`InferenceResult` with model SimpleEcosystemModel
The loss has signficiantly reduced. This means that this model better explains the dynamics, and as such, we have discovered that water avilability is indeed an important driver of ecosystem dynamics! Let’s plot the simulation output of this hyrbid model
simul_hybr_forecast = simulate(model_hybrid,
p = res_hybr.p_trained,
# u0 = res_hybr.u0s_trained[1],
u0 = data[:,1],
saveat = vcat(tsteps, tsteps_forecast),
tspan = (0, tsteps_forecast[end]));
fig, ax = subplots(1, figsize=(7,4))
for i in 1:N
ax.scatter(tsteps,
data[i,:],
label = labels_sp[i],
color = species_colors[i],
s = 6.)
ax.plot(tsteps[1:end],
simul_hybr_forecast[i,1:length(tsteps)],
c = species_colors[i])
ax.plot(tsteps_forecast,
simul_hybr_forecast[i,length(tsteps)+1:end],
linestyle="--",
c = species_colors[i])
end
ax.set_ylabel("Species abundance")
ax.set_xlabel("Time (days)")
fig.set_facecolor("None")
ax.set_facecolor("None")
fig.legend()
display(fig)
The cool thing is that although it contains a fully parametric component (the neural network), this hybrid can still extrapolate, because it is constrained by mechanistic processes.
plot_time_series(simulate(model_hybrid,
p = res_hybr.p_trained,
u0 = Float32[0., 0.060, 0.945],
saveat=0:dt:100.));
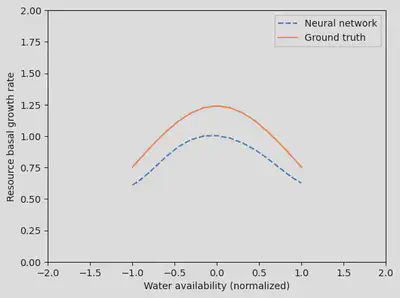
And what’s even cooler is that by interpreting the neural network, we can actually learn a new process: the shape of the dependence between the resource growth rate and the water availability!
water_avail = reshape(sort!(water_availability.(tsteps)),1,:)
p_nn_trained = res_hybr.p_trained.p_nn
gr = neural_net(water_avail, p_nn_trained, st)[1]
fig, ax = subplots(1)
ax.plot(water_avail[:],
gr[:],
label="Neural network",
linestyle="--")
gr_true = model.mp.p[1] .* exp.(-0.5 .* water_avail.^2)
ax.plot(water_avail[:], gr_true[:], label="Ground truth")
ax.set_ylim(0,2)
ax.set_xlim(-2,2)
ax.legend()
xlabel("Water availability (normalized)")
ylabel("Resource basal growth rate")
display(fig)
Wrap-up
Hybrid approaches are the future! But they
- Require
- domain specific knowledge
- expertise in mechanistic modelling
- expertise in machine learning
- Requires differentiable programming and interoperability between scientific libraries
-
What
 is best at
is best at -
But JAX is also very cool 🫠
-